PSNR
通常在經過影像壓縮之後,輸出的影像通常都會有某種程度與原始影像不一樣。為了衡量經過處理後的影像品質,我們通常會參考
PSNR值(峰值信號雜訊比 (Peak Signal to Noise Ratio))
來認定某個處理程序是否令人滿意。
PSNR值越大,就代表失真越少
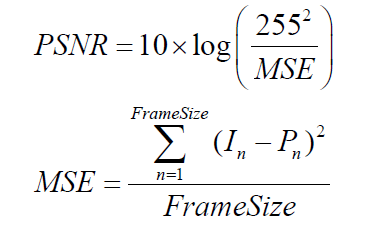
Peak就是指8 bits表示法的最大值255。MSE指 Mean Square Error,

In指原始影像第n個pixel值,Pn指經處理後的影像第n個pixel值,FrameSize是影像長度x寬度x通道數(灰階為1,彩色為3)。PSNR的單位為dB。
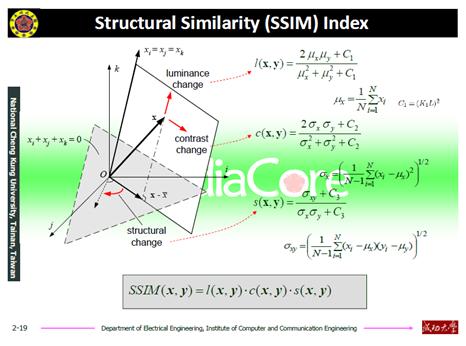
SSIM
大多數的基於誤差敏感度(error sensitivity)的質量評估方法(如MSE,PSNR)使用線性變換來分解圖像信號,這不會涉及到相關性。我們要討論的SSIM就是要找到更加直接的方法來比較失真圖像和參考圖像的結構。
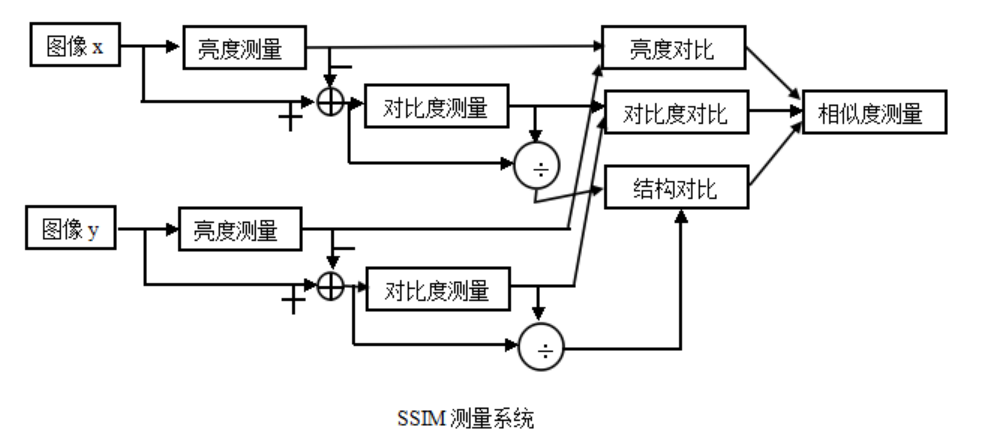
由SSIM測量系統可得相似度的測量可由三種對比模塊組成,分別為:亮度,對比度,結構。
對於離散信號,我們以平均灰度來作為亮度測量的估計l(x,y)
可使用標準差來做對比度估量值c(x,y)。
信號被自己的標準差相除,結構對比函數就被定義成s(x,y)
常數C是為了避免 接近0而造成系統的不穩定。
接近0而造成系統的不穩定。